
4.1 KiB
Ch 4: Iterative improvement
Simulated annealing
Idea: escape local maxima by allowing some bad moves but gradually decrease their size and frequency. This is similar to gradient descent. Idea comes from making glass where you start very hot and then slowely cool down the temperature.
Beam search
Idea: keep k states instead of 1; choose top k of their successors.
Problem: quite often all k states end up on same local hill. This can somewhat be overcome by randomly choosing k states but, favoring the good ones.
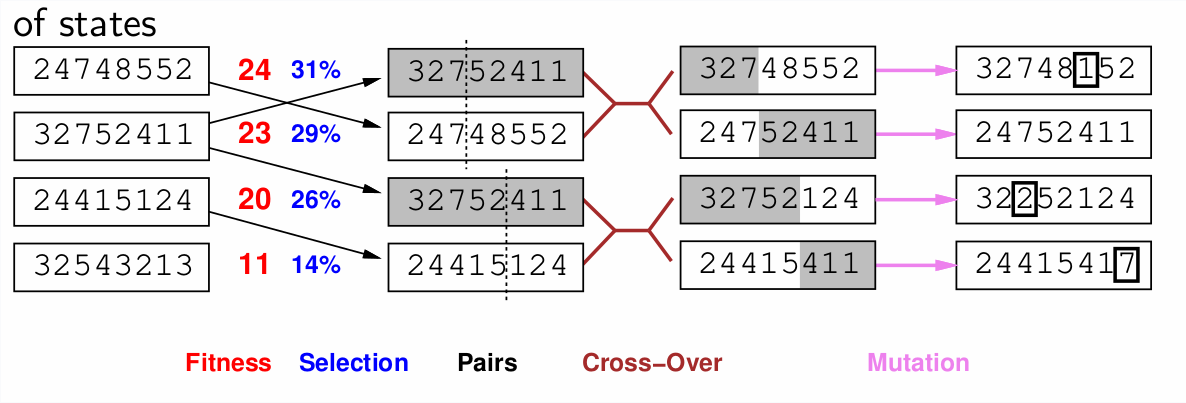
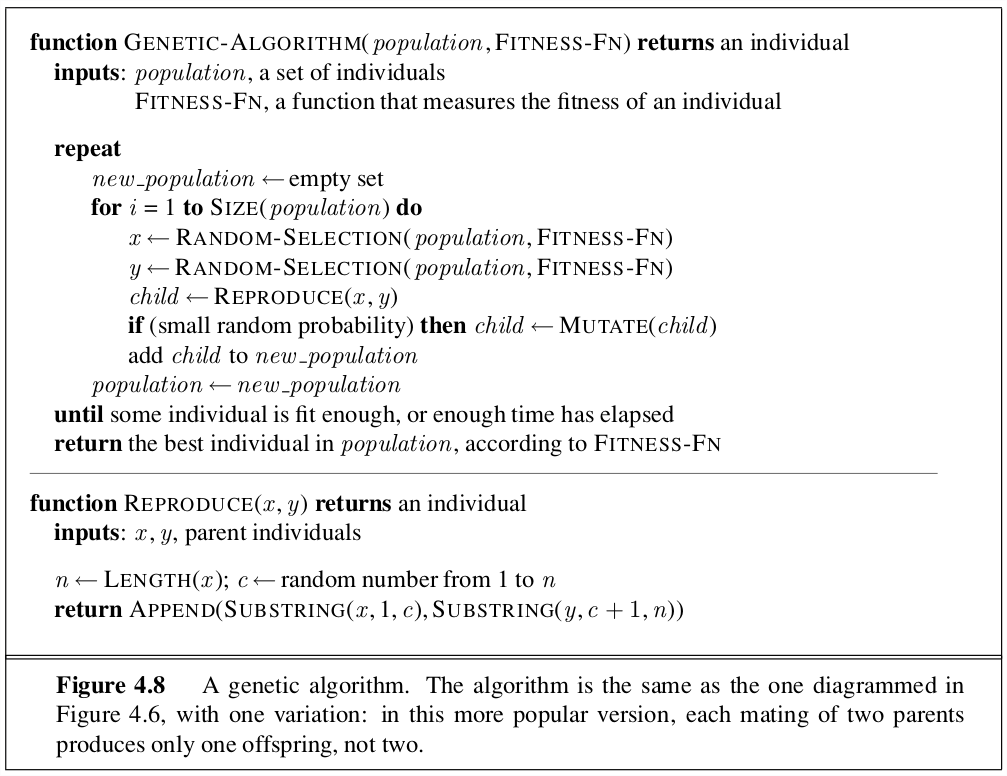
Genetic algorithms
Inspired by Charles Darwin's theory of evolution. The algorithm is an extension of local beam search with cuccessors generated from pairs of individuals rather than a successor function.
Ch 6: Constraint satisfaction problems
Ex CSP problems:
- assignment
- timetabling
- hardware configuration
- spreadsheets
- factory scheduling
- Floor-planning
Problem formulation

Variables
Elements in the problem.
Domains
Possible values from domain $D_i$, try to be mathematical when formulating.
Constraints
Constraints on the variables specifying what values from the domain they may have.
Types of constraints:
- Unary: Constraints involving single variable
- Binary: Constraints involving pairs of variables
- Higher-order: Constraints involving 3 or more variables
- Preferences: Where you favor one value in the domain more than another. This is mostly used for constrained optimization problems.
Constraint graphs
Nodes in graph are variables, arcs show constraints
Backtracking
![]()
Minimum remaining value

Choose the variable wit the fewest legal values left.
Degree heuristic

Tie-breaker for minimum remaining value heuristic. Choose the variable with the most constraints on remaining variables.
Least constraining value
Choose the least constraining value: one that rules out fewest values in remaining variables.

Forward checking
Keep track of remaining legal values for unassigned variables and terminate search when any variable has no legal values left. This will help reduce how many nodes in the tree you have to expand.

Constraint propagation

Arc consistency

Tree structured CSPs
Theorem: if constraint graph has no loops, the CSP ca be solved in $O(n*d^2)$ time. General CSP is $O(d^n)$

Connections to tree search, iterative improvement
To apply this to hill-climbing, you select any conflicted variable and then use a min-conflicts heuristic to choose a value that violates the fewest constraints.

CH 13: Uncertainty
Basic theory and terminology
Probability space
The probability space $\omega$ is all possible outcomes. A dice roll has 6 possible outcomes.
Atomic Event
An atomic event w is a single element from the probability space. $w \in \omega$ Ex: rolling a dice of 4 The probability of w is between [0,1].
Event
An event A is any subset of the probability space $\omega$ The probability of an event is the sum of the probabilities of the atom events in the event.
Ex: probability of rolling a even number dice is 1/2.
P(die roll odd) = P(1)+P(2)+3P(5) = 1/6+1/6+1/6 = 1/2
Random variable
Is a function from some sample points to some range. eg reals or booleans. eg: P(Even = true)
Prior probability
Probabilities based given one or more events. Ex: probability cloudy and fall = 0.72.
Given two variables with two possible assignments, we could represent all the information in a 2x2 matrix.
Conditional Probability
Probabilities based within a event. Eg: P(tired | monday) = .9.
Bayes rule

Independence
