|
|
|
@ -0,0 +1,344 @@ |
|
|
|
CSCI-331 Intro to Artificial Intelligence exam 1 review. |
|
|
|
|
|
|
|
# Chapter 1 What is AI |
|
|
|
|
|
|
|
## Thinking vs Acting |
|
|
|
|
|
|
|
## Rational Vs. Human like |
|
|
|
|
|
|
|
Acting rational is doing the right thing given what you know. |
|
|
|
|
|
|
|
Thinking rationality: |
|
|
|
- Law of though approach -- thinking is all logic driven |
|
|
|
- Neuroscience -- how brains process information |
|
|
|
- Cognitive Science -- information-processing psychology prevailing orthodoxy of hehaviorism |
|
|
|
|
|
|
|
# Chapter 2 Intelligent Agents |
|
|
|
|
|
|
|
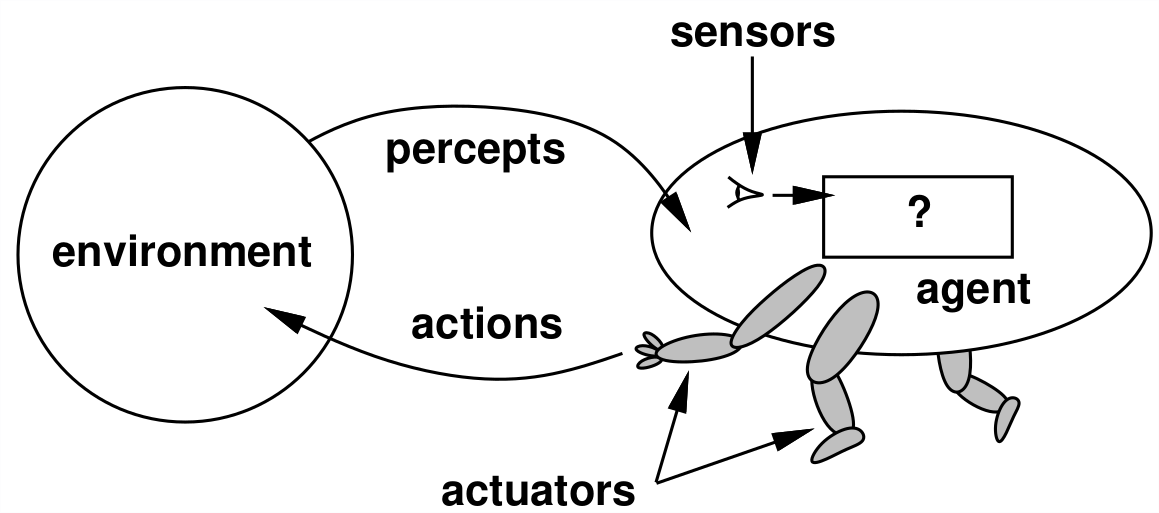
An agent is anything that can view environment through sensors and act with actuators. |
|
|
|
A rational agent is one that does the right thing. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
## PEAS |
|
|
|
|
|
|
|
PEAS is an acronym for defining a task environment |
|
|
|
|
|
|
|
### Performance Measure |
|
|
|
|
|
|
|
Measure of how well agent is performing. |
|
|
|
|
|
|
|
Ex: safe, fast, legal, profits, time, etc. |
|
|
|
|
|
|
|
### Environment |
|
|
|
|
|
|
|
Place in which the agent is acting. |
|
|
|
|
|
|
|
Ex: Roads, pedestrians, online, etc. |
|
|
|
|
|
|
|
### Actuators |
|
|
|
|
|
|
|
Way in which agent acts. |
|
|
|
|
|
|
|
Ex: steering, signal, jump, walk, turn, etc. |
|
|
|
|
|
|
|
### Sensors |
|
|
|
|
|
|
|
Way which the agent can see the environment. |
|
|
|
|
|
|
|
Ex: Cameras, speedometer, GPS, sonar, etc. |
|
|
|
|
|
|
|
## Environment Properties (y/n) |
|
|
|
|
|
|
|
### Observable |
|
|
|
|
|
|
|
Full observable if agent has access to complete state of environment at any given time. |
|
|
|
|
|
|
|
Partially observable if agent can only see part of environment. |
|
|
|
|
|
|
|
### Deterministic |
|
|
|
|
|
|
|
If the next state of environment is completely determined by current state it is **deterministic**, otherwise it is **stochastic**. |
|
|
|
|
|
|
|
### Episodic |
|
|
|
|
|
|
|
If agents current actions does not affect the next problem/performance then it is **episodic**, otherwise it is **sequential** |
|
|
|
|
|
|
|
### Static |
|
|
|
|
|
|
|
If environment changes while agent is deliberating it is **dynamic** otherwise it is **static**. |
|
|
|
|
|
|
|
### Discrete |
|
|
|
|
|
|
|
If there are a finite number of states in the environment it is **discrete** otherwise it is **continuous**. |
|
|
|
|
|
|
|
### Single-Agent |
|
|
|
|
|
|
|
Only one agent in environment like solving a crossword puzzle. A game of chess would be **multi-agent. |
|
|
|
|
|
|
|
## Agent Types |
|
|
|
|
|
|
|
### Simple Reflex |
|
|
|
|
|
|
|
Simply responds to a given input based on a action rule set. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
### Reflex with state |
|
|
|
|
|
|
|
Understands to some extend how the world evolves. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
### Goal-based |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
### Utility-based |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
### Learning |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
# Chapter 3 Problem Solving Agents |
|
|
|
|
|
|
|
## Problem Formulation |
|
|
|
|
|
|
|
Process of deciding what actions and states to consider, given a goal. |
|
|
|
|
|
|
|
### Initial State |
|
|
|
|
|
|
|
The state that the agent starts in. |
|
|
|
|
|
|
|
### Successor Function |
|
|
|
|
|
|
|
A description of the actions available to the agent. |
|
|
|
|
|
|
|
### Goal Test |
|
|
|
|
|
|
|
Determines whether a given state is the goal. |
|
|
|
|
|
|
|
### Path Cost (Additive) |
|
|
|
|
|
|
|
A function that assigns a numerical cost to each path. The step cost is the number of actions required. |
|
|
|
|
|
|
|
## Problem Types |
|
|
|
|
|
|
|
### Deterministic, fully observable => single-state problem |
|
|
|
|
|
|
|
Agent knows exactly which state it will be in; solution is a sequence. |
|
|
|
|
|
|
|
### Non-observable => conformant problem |
|
|
|
|
|
|
|
Agent may have no idea where it is; solution (if any) is a sequence |
|
|
|
|
|
|
|
### Non-deterministic and/or partially observable => Contingency problem |
|
|
|
|
|
|
|
- Percepts provide new information about current state |
|
|
|
- solution is a contingent plan or a policy |
|
|
|
- often interleave search, execution |
|
|
|
|
|
|
|
### Unknown state space => exploration problem |
|
|
|
|
|
|
|
Exploration problem |
|
|
|
|
|
|
|
# Chapter 3 Graph and tree search for single-state problems |
|
|
|
|
|
|
|
## Uniformed |
|
|
|
|
|
|
|
AKA blind search. |
|
|
|
All they can do is generate successors and distinguish a goal state from a non-goal state; |
|
|
|
they have no knowledge of what paths are more likely to bring them to a solution. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
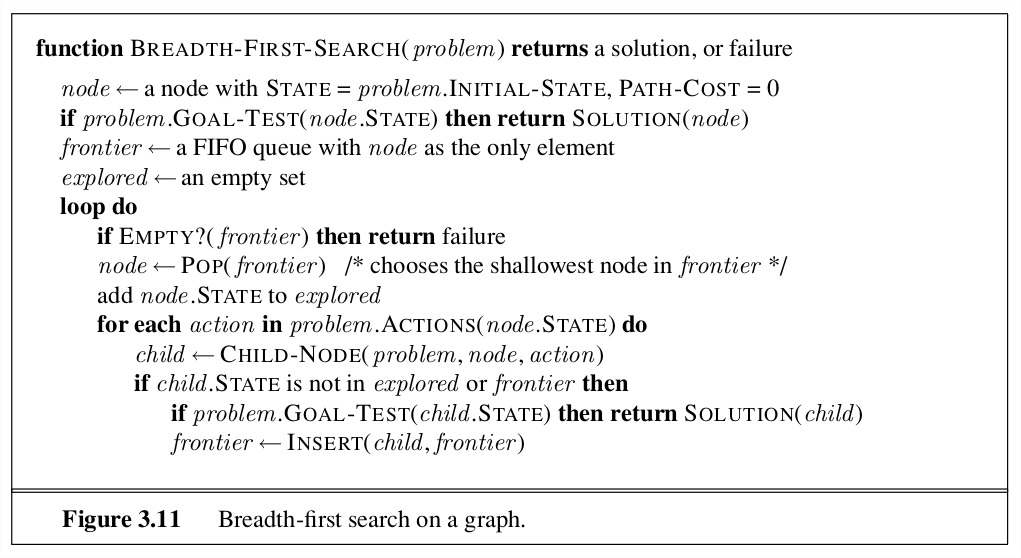
### Breadth-first |
|
|
|
|
|
|
|
General graph-search algo where shallowest unexpanded node is chosen first for expansion. |
|
|
|
This is implemented by using a FIFO queue for the frontier. |
|
|
|
The solution will be ideal if the path cost between each node is equal. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
### Depth-first |
|
|
|
|
|
|
|
You expand the deepest unexpanded node first. |
|
|
|
Implementation: the fringe is a LIFO queue. |
|
|
|
|
|
|
|
#### Depth Limited Search |
|
|
|
|
|
|
|
To avoid an infinite search space, depth limited search provides a max depth that the search algo is willing to traverse. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
### Uniform-cost |
|
|
|
|
|
|
|
Instead of expanding shallowest nodes, **uniform-cost search** expands the node *n* with lowest path cost: g(n). |
|
|
|
Implementation: priority queue ordered by *g*. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
## Informed |
|
|
|
|
|
|
|
Using problem-specific knowledge, applies an informed search strategy which is often more efficient than uninformed strategies. |
|
|
|
|
|
|
|
### Greed best-fit |
|
|
|
|
|
|
|
Tries to expand node that is closest to goal. It evaluates each node by the heuristic function: |
|
|
|
|
|
|
|
$$ |
|
|
|
f(n) = h(n) |
|
|
|
$$ |
|
|
|
|
|
|
|
A common heuristic used is the euclidean distance (straight line distance) to the solution. |
|
|
|
Note: this search method can be incomplete since it can still get caught in infinite loops if you don't use a graph search method or implement an max depth. |
|
|
|
|
|
|
|
### A* |
|
|
|
|
|
|
|
Regarded as the best best-first search algo. |
|
|
|
Combines heuristic distance estimate with actual cost. |
|
|
|
|
|
|
|
$$ |
|
|
|
f(n) = g(n) + h(n) |
|
|
|
$$ |
|
|
|
|
|
|
|
*g* gives the cost of getting from the start node to the current node. |
|
|
|
|
|
|
|
In order for this to give optimal cost, *h* must be an **admissible heuristic**: an heuristic which never overestimates the cost to reach the goal. |
|
|
|
|
|
|
|
- Complete?? no |
|
|
|
|
|
|
|
- Time?? $O(b^{d + 1})$ same as breadth first search but usually faster |
|
|
|
|
|
|
|
- Space?? $O(b^{d + 1})$ keeps every node in memory |
|
|
|
|
|
|
|
- Optimal?? Only if the heuristic is admissible. |
|
|
|
|
|
|
|
## Evaluation |
|
|
|
|
|
|
|
### Branching factor |
|
|
|
|
|
|
|
### Depth of least-cost solution |
|
|
|
|
|
|
|
### Maximum depth of tree |
|
|
|
|
|
|
|
### Completeness |
|
|
|
|
|
|
|
Is the algo guaranteed to fina a solution if there is one. |
|
|
|
|
|
|
|
### Optimality |
|
|
|
|
|
|
|
Will the strategy find the optimal solution. |
|
|
|
|
|
|
|
### Space complexity |
|
|
|
|
|
|
|
How much memory is required to perform the search. |
|
|
|
|
|
|
|
### Time complexity |
|
|
|
|
|
|
|
How long does it take to find the solution. |
|
|
|
|
|
|
|
## Heuristics |
|
|
|
|
|
|
|
A heuristic function *h(n)* estimates the cost of a solution beginning from the state at node *n*. |
|
|
|
|
|
|
|
### Admissibility |
|
|
|
|
|
|
|
These heuristics can be derived from a relaxed version of a problem. |
|
|
|
Heuristic must never overestimate the cost to reach the goal. |
|
|
|
|
|
|
|
### Dominance |
|
|
|
|
|
|
|
If one heuristic is greater than another for all states *n*, then it dominates the other. |
|
|
|
Typically dominating heuristics are better for the search. |
|
|
|
You can form a new dominating admissible heuristic by taking the max of two other admissible heuristics. |
|
|
|
|
|
|
|
# Chapter 4 Iterative Improvement |
|
|
|
|
|
|
|
Optimization problem where the path is irrelevant, the goal state is the solution. |
|
|
|
Rather than searching through all possible solutions, iterative improvement takes the current state and tries to improve it. |
|
|
|
Since the solution space is super large, it is often not possible to try every possible combination. |
|
|
|
|
|
|
|
|
|
|
|
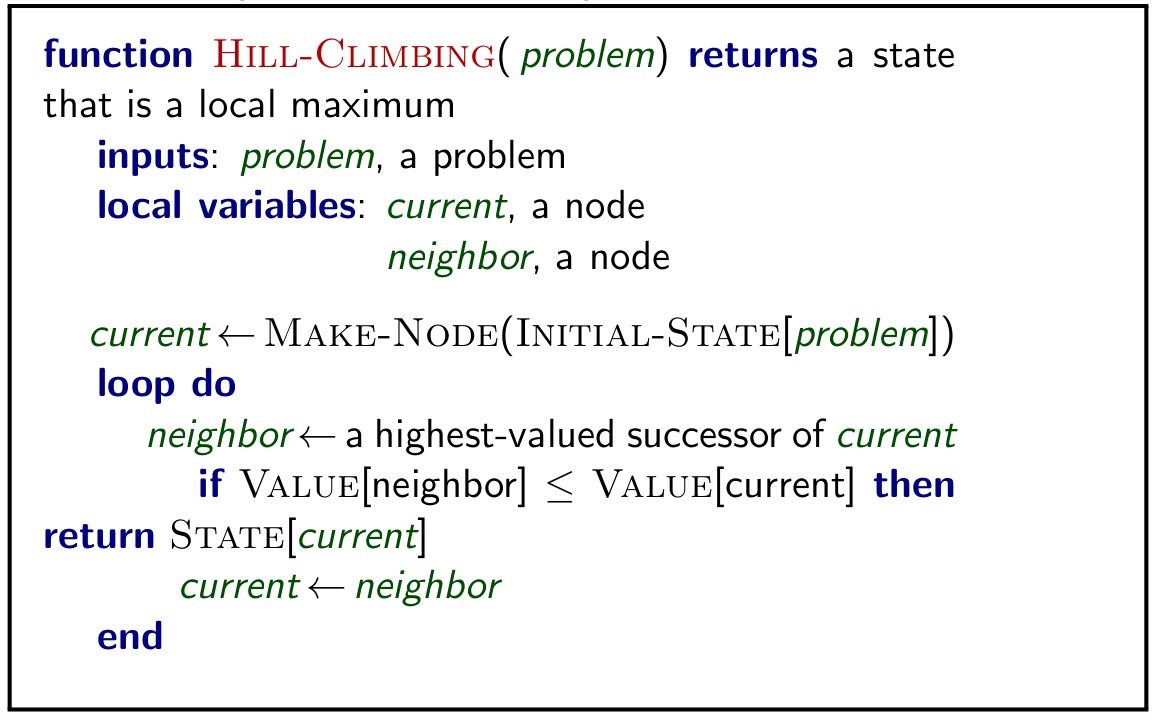
## Hill Climbing |
|
|
|
|
|
|
|
Basic algorithm which continually moves in the direction of increasing value. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
To avoid finding a local maximum several methods can be employed: |
|
|
|
|
|
|
|
- Random-restart hill climbing |
|
|
|
- Random sideways move -- escapes from shoulders loop on flat maxima. |
|
|
|
|
|
|
|
## Simulated annealing |
|
|
|
|
|
|
|
Idea: escape local maxima by allowing some bad moves but gradually decrease their size and frequency. |
|
|
|
This is similar to gradient descent. |
|
|
|
Idea comes from making glass where you start very hot and then slowely cool down the temperature. |
|
|
|
|
|
|
|
## Beam Search |
|
|
|
|
|
|
|
Idea: keep k states instead of 1; choose top k of their successors. |
|
|
|
|
|
|
|
Problem: quite often all k states end up on same local hill. This can somewhat be overcome by randomly choosing k states but, favoring the good ones. |
|
|
|
|
|
|
|
## Genetic Algorithms |
|
|
|
|
|
|
|
Inspired by Charles Darwin's theory of evolution. |
|
|
|
The algorithm is an extension of local beam search with cuccessors generated from pairs of individuals rather than a successor function. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
# Chapter 5 Game Theory |
|
|
|
|
|
|
|
## Minimax |
|
|
|
|
|
|
|
Algorithm to determine perfect play for deterministic, perfect information games. |
|
|
|
Idea: assume opponent is also a rational agent, you choose to make the choice which is the best achievable payoff against the opponents best play. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
### Properties |
|
|
|
|
|
|
|
- complete: yes if tree is finite |
|
|
|
- optimal: yes, against an optimal opponent |
|
|
|
- Time complexity: $O(B^m)$ |
|
|
|
- Space Complexity: $O(bm)$ depth-first exploration |
|
|
|
|
|
|
|
This makes a game of chess with a branch factor of 35 and estimated moves around 100 totally infeasible: 35^100! |
|
|
|
|
|
|
|
## α-β pruning |
|
|
|
|
|
|
|
Idea: prune paths which will not yield a better solution that one already found. |
|
|
|
The pruning does not affect the final result. |
|
|
|
Good move exploration ordering will improve the effectiveness of pruning. |
|
|
|
With perfect ordering, time complexity is: $O^{\frac{m}{2}}$. |
|
|
|
This doubles our solvable depth, but, still infeasible for chess. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
## Resource limits |
|
|
|
|
|
|
|
Due to constraint, we typically use the **Cutoff-test** rather than the **terminal-test**. |
|
|
|
The terminal test requires us to explore all nodes in the mini-max search. |
|
|
|
The cutoff test branches out to a certain depth and then applies a evaluation function to determine the desirability of a position. |
|
|
|
|
|
|
|
## Randomness/ Nondeterministic games |
|
|
|
|
|
|
|
Often times games involve chance such as a coin flip or a dice roll. |
|
|
|
You can modify the mini-max tree to branch with each probability and take the average of evaluating each branch. |
|
|
|
|
|
|
|
 |


{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
