|
|
|
@ -0,0 +1,323 @@ |
|
|
|
Alright, this post is long overdue; today, we are using quadtrees to partition images. I wrote this code before writing the post on [generic quad trees](https://jrtechs.net/data-science/implementing-a-quadtree-in-python). However, I haven't had time to turn it into a blog post until now. Let's dive right into this post where I use a custom quadtree implementation and OpenCV to partition images. |
|
|
|
|
|
|
|
But first, why might you want to use quadtrees on an image? In the last post on quadtrees, we discussed how quadtrees get used for efficient spatial search. |
|
|
|
That blog post covered point quadtrees where every element in the quadtree got represented as a single fixed point. |
|
|
|
With images, each node in the quadtree represents a region of the image. |
|
|
|
We can generate our quadtree in a similar fashion where instead of dividing based on how many points are in the region, we can divide based on the contrast in the cell. |
|
|
|
The end goal is to create partitions that minimize the contrast contained within each node/cell. |
|
|
|
By doing so, we can compress our image while preserving essential details. |
|
|
|
|
|
|
|
With that said, let's jump into the python code. Like most of my open CV projects, we start by importing the standard dependencies, loading a test image, and then defining some helper functions that easily display images in notebooks. |
|
|
|
The full Jupyter notebook for this post is in my [Random Scripts repository](https://github.com/jrtechs/RandomScripts/tree/master/notebooks) on Github. |
|
|
|
|
|
|
|
|
|
|
|
```python |
|
|
|
# Open cv library |
|
|
|
import cv2 |
|
|
|
|
|
|
|
# matplotlib for displaying the images |
|
|
|
from matplotlib import pyplot as plt |
|
|
|
import matplotlib.patches as patches |
|
|
|
|
|
|
|
import random |
|
|
|
import math |
|
|
|
import numpy as np |
|
|
|
|
|
|
|
img = cv2.imread('night2.jpg') |
|
|
|
|
|
|
|
def printI(img): |
|
|
|
fig= plt.figure(figsize=(20, 20)) |
|
|
|
rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) |
|
|
|
plt.imshow(rgb) |
|
|
|
|
|
|
|
|
|
|
|
def printI2(i1, i2): |
|
|
|
fig= plt.figure(figsize=(20, 10)) |
|
|
|
ax1 = fig.add_subplot(1,2,1) |
|
|
|
ax1.imshow(cv2.cvtColor(i1, cv2.COLOR_BGR2RGB)) |
|
|
|
ax2 = fig.add_subplot(1,2,2) |
|
|
|
ax2.imshow(cv2.cvtColor(i2, cv2.COLOR_BGR2RGB)) |
|
|
|
``` |
|
|
|
|
|
|
|
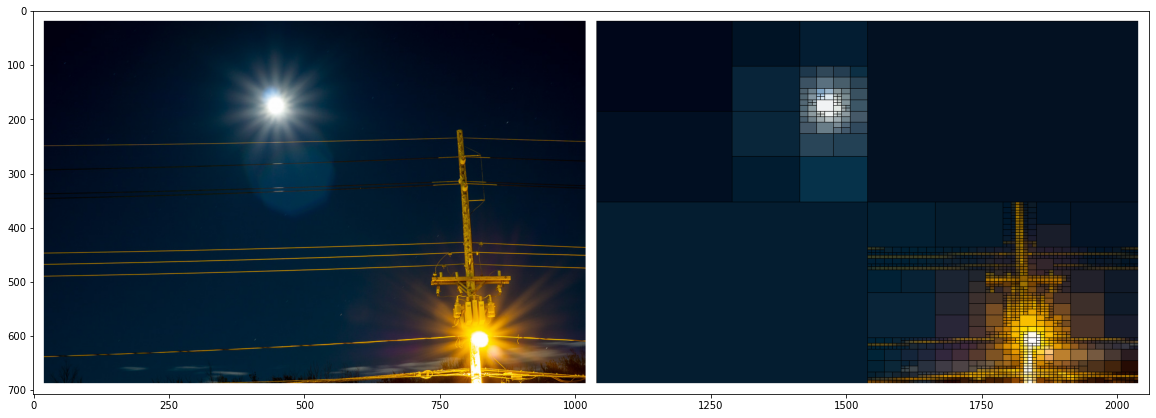
The test image is a long exposure shot of a street light with a full moon in the background. Notice that the moon and streetlight's overexposed nature blow them out, creating a star beam effect. |
|
|
|
We would expect to retain details in the moon and telephone pole when compressing the image. |
|
|
|
|
|
|
|
```python |
|
|
|
printI(img) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
Like our last implementation of a quadtree, a node is simply a representation of a spatial region. |
|
|
|
In our case, it is the top-left point of the image, followed by its width and height. |
|
|
|
To divide our image, we need to get a sense of node "purity." |
|
|
|
We are using the mean squared error of the pixels to determine that. |
|
|
|
Additionally, we are doing a weighted average of the color layers, favoring the green layer the most. |
|
|
|
Why we are favoring the green layer can be a point of future blog posts, but it has to do with the quantum efficiency of silicon to different types of light. |
|
|
|
I added normalization to our error function by dividing it by a large number; this makes it easier to tune the resulting hyperparameter in the end. |
|
|
|
|
|
|
|
```python |
|
|
|
class Node(): |
|
|
|
def __init__(self, x0, y0, w, h): |
|
|
|
self.x0 = x0 |
|
|
|
self.y0 = y0 |
|
|
|
self.width = w |
|
|
|
self.height = h |
|
|
|
self.children = [] |
|
|
|
|
|
|
|
def get_width(self): |
|
|
|
return self.width |
|
|
|
|
|
|
|
def get_height(self): |
|
|
|
return self.height |
|
|
|
|
|
|
|
def get_points(self): |
|
|
|
return self.points |
|
|
|
|
|
|
|
def get_points(self, img): |
|
|
|
return img[self.x0:self.x0 + self.get_width(), self.y0:self.y0+self.get_height()] |
|
|
|
|
|
|
|
def get_error(self, img): |
|
|
|
pixels = self.get_points(img) |
|
|
|
b_avg = np.mean(pixels[:,:,0]) |
|
|
|
b_mse = np.square(np.subtract(pixels[:,:,0], b_avg)).mean() |
|
|
|
|
|
|
|
g_avg = np.mean(pixels[:,:,1]) |
|
|
|
g_mse = np.square(np.subtract(pixels[:,:,1], g_avg)).mean() |
|
|
|
|
|
|
|
r_avg = np.mean(pixels[:,:,2]) |
|
|
|
r_mse = np.square(np.subtract(pixels[:,:,2], r_avg)).mean() |
|
|
|
|
|
|
|
e = r_mse * 0.2989 + g_mse * 0.5870 + b_mse * 0.1140 |
|
|
|
|
|
|
|
return (e * img.shape[0]* img.shape[1])/90000000 |
|
|
|
``` |
|
|
|
|
|
|
|
After we have our nodes, we can create our quadtree data structure. |
|
|
|
As a design decision, the image gets stored in the quadtree where the nodes only contain partitioning information and not the image itself. |
|
|
|
To recursively parse the tree or display it, we merely need to pass the image pointer around rather than have copies of the image at each node of the tree. |
|
|
|
Additionally, we add two visualization methods to the quadtree class. One that displays a wireframe view of the nodes, the other that visualizes each leaf node by rendering that region's average color. |
|
|
|
|
|
|
|
|
|
|
|
```python |
|
|
|
class QTree(): |
|
|
|
def __init__(self, stdThreshold, minPixelSize, img): |
|
|
|
self.threshold = stdThreshold |
|
|
|
self.min_size = minPixelSize |
|
|
|
self.minPixelSize = minPixelSize |
|
|
|
self.img = img |
|
|
|
self.root = Node(0, 0, img.shape[0], img.shape[1]) |
|
|
|
|
|
|
|
def get_points(self): |
|
|
|
return img[self.root.x0:self.root.x0 + self.root.get_width(), self.root.y0:self.root.y0+self.root.get_height()] |
|
|
|
|
|
|
|
def subdivide(self): |
|
|
|
recursive_subdivide(self.root, self.threshold, self.minPixelSize, self.img) |
|
|
|
|
|
|
|
def graph_tree(self): |
|
|
|
fig = plt.figure(figsize=(10, 10)) |
|
|
|
plt.title("Quadtree") |
|
|
|
c = find_children(self.root) |
|
|
|
print("Number of segments: %d" %len(c)) |
|
|
|
for n in c: |
|
|
|
plt.gcf().gca().add_patch(patches.Rectangle((n.y0, n.x0), n.height, n.width, fill=False)) |
|
|
|
plt.gcf().gca().set_xlim(0,img.shape[1]) |
|
|
|
plt.gcf().gca().set_ylim(img.shape[0], 0) |
|
|
|
plt.axis('equal') |
|
|
|
plt.show() |
|
|
|
return |
|
|
|
|
|
|
|
def render_img(self, thickness = 1, color = (0,0,255)): |
|
|
|
imgc = self.img.copy() |
|
|
|
c = find_children(self.root) |
|
|
|
for n in c: |
|
|
|
pixels = n.get_points(self.img) |
|
|
|
# grb |
|
|
|
gAvg = math.floor(np.mean(pixels[:,:,0])) |
|
|
|
rAvg = math.floor(np.mean(pixels[:,:,1])) |
|
|
|
bAvg = math.floor(np.mean(pixels[:,:,2])) |
|
|
|
|
|
|
|
imgc[n.x0:n.x0 + n.get_width(), n.y0:n.y0+n.get_height(), 0] = gAvg |
|
|
|
imgc[n.x0:n.x0 + n.get_width(), n.y0:n.y0+n.get_height(), 1] = rAvg |
|
|
|
imgc[n.x0:n.x0 + n.get_width(), n.y0:n.y0+n.get_height(), 2] = bAvg |
|
|
|
|
|
|
|
if thickness > 0: |
|
|
|
for n in c: |
|
|
|
# Draw a rectangle |
|
|
|
imgc = cv2.rectangle(imgc, (n.y0, n.x0), (n.y0+n.get_height(), n.x0+n.get_width()), color, thickness) |
|
|
|
return imgc |
|
|
|
``` |
|
|
|
|
|
|
|
The recursive subdivision of a quadtree is very similar to that of a standard decision tree. |
|
|
|
We define two stopping criteria: node size and contrast. |
|
|
|
Like a decision tree, creating nodes that are too small is pedantic because it doesn't abstract the image and overfits. |
|
|
|
With an image, if we let our nodes become one pixel in size, it effectively just becomes the original image. |
|
|
|
Regarding contrast, if there is a lot of contrast, we want to continue dividing, where if there is little contrast, we want to stop dividing-- preserving global features of the image while throwing away local details. |
|
|
|
|
|
|
|
```python |
|
|
|
def recursive_subdivide(node, k, minPixelSize, img): |
|
|
|
|
|
|
|
if node.get_error(img)<=k: |
|
|
|
return |
|
|
|
w_1 = int(math.floor(node.width/2)) |
|
|
|
w_2 = int(math.ceil(node.width/2)) |
|
|
|
h_1 = int(math.floor(node.height/2)) |
|
|
|
h_2 = int(math.ceil(node.height/2)) |
|
|
|
|
|
|
|
|
|
|
|
if w_1 <= minPixelSize or h_1 <= minPixelSize: |
|
|
|
return |
|
|
|
x1 = Node(node.x0, node.y0, w_1, h_1) # top left |
|
|
|
recursive_subdivide(x1, k, minPixelSize, img) |
|
|
|
|
|
|
|
x2 = Node(node.x0, node.y0+h_1, w_1, h_2) # btm left |
|
|
|
recursive_subdivide(x2, k, minPixelSize, img) |
|
|
|
|
|
|
|
x3 = Node(node.x0 + w_1, node.y0, w_2, h_1)# top right |
|
|
|
recursive_subdivide(x3, k, minPixelSize, img) |
|
|
|
|
|
|
|
x4 = Node(node.x0+w_1, node.y0+h_1, w_2, h_2) # btm right |
|
|
|
recursive_subdivide(x4, k, minPixelSize, img) |
|
|
|
|
|
|
|
node.children = [x1, x2, x3, x4] |
|
|
|
|
|
|
|
|
|
|
|
def find_children(node): |
|
|
|
if not node.children: |
|
|
|
return [node] |
|
|
|
else: |
|
|
|
children = [] |
|
|
|
for child in node.children: |
|
|
|
children += (find_children(child)) |
|
|
|
return children |
|
|
|
``` |
|
|
|
|
|
|
|
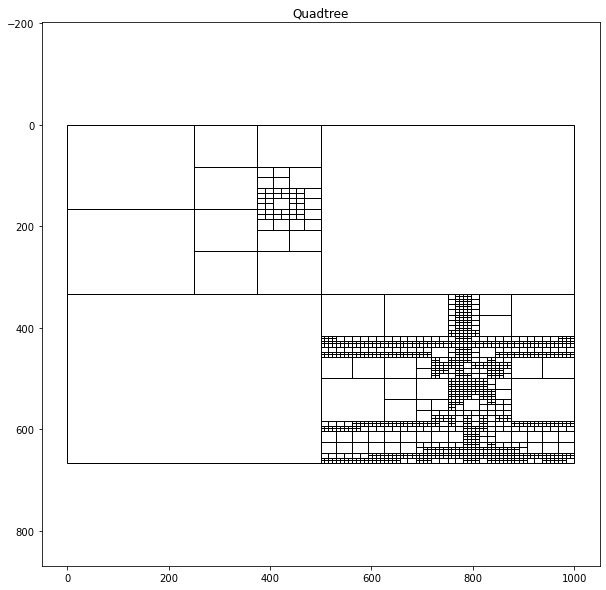
If we partition the same image using two different sets of hyperparameters, we can see how we can manipulate how much the quadtree algorithm partitions the image. |
|
|
|
If we set the sum of square error threshold low, the quadtree will produce many cells, where if we assign the threshold high, it will create fewer cells. |
|
|
|
|
|
|
|
```python |
|
|
|
qtTemp = QTree(4, 3, img) #contrast threshold, min cell size, img |
|
|
|
qtTemp.subdivide() # recursively generates quad tree |
|
|
|
qtTemp.graph_tree() |
|
|
|
|
|
|
|
qtTemp2 = QTree(9, 5, img) |
|
|
|
qtTemp2.subdivide() |
|
|
|
qtTemp2.graph_tree() |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
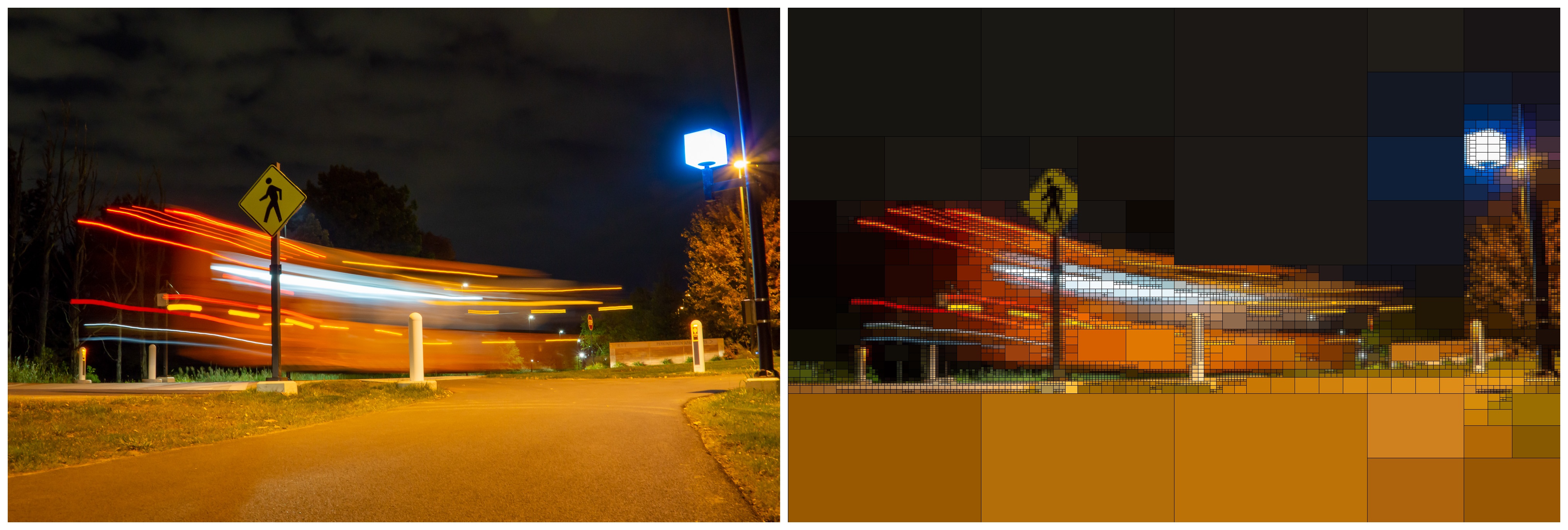
As a final esthetic, I want to display the rendered version alongside the original photograph. |
|
|
|
For the sake of simplicity, I am adding a white border surrounding the two images and contacting them together to form a diptych. |
|
|
|
|
|
|
|
```python |
|
|
|
def concat_images(img1, img2, boarder=5, color=(255,255,255)): |
|
|
|
img1_boarder = cv2.copyMakeBorder( |
|
|
|
img1, |
|
|
|
boarder, #top |
|
|
|
boarder, #btn |
|
|
|
boarder, #left |
|
|
|
boarder, #right |
|
|
|
cv2.BORDER_CONSTANT, |
|
|
|
value=color |
|
|
|
) |
|
|
|
img2_boarder = cv2.copyMakeBorder( |
|
|
|
img2, |
|
|
|
boarder, #top |
|
|
|
boarder, #btn |
|
|
|
0, #left |
|
|
|
boarder, #right |
|
|
|
cv2.BORDER_CONSTANT, |
|
|
|
value=color |
|
|
|
) |
|
|
|
return np.concatenate((img1_boarder, img2_boarder), axis=1) |
|
|
|
``` |
|
|
|
|
|
|
|
Next, we wrap our quadtree algorithm with our output visualization to make creating the diptychs easier. |
|
|
|
The left is the original image, where the right is the rendered quadtree version. |
|
|
|
Each leaf node in the quadtree gets visualized by taking the average pixel values from the cell. |
|
|
|
Moreover, I added an outline to each cell to emphasize the cells produced. |
|
|
|
I found that either a red or black outline worked the best. |
|
|
|
|
|
|
|
```python |
|
|
|
def displayQuadTree(img_name, threshold=7, minCell=3, img_boarder=20, line_boarder=1, line_color=(0,0,255)): |
|
|
|
imgT= cv2.imread(img_name) |
|
|
|
qt = QTree(threshold, minCell, imgT) |
|
|
|
qt.subdivide() |
|
|
|
qtImg= qt.render_img(thickness=line_boarder, color=line_color) |
|
|
|
file_name = "output/" + img_name.split("/")[-1] |
|
|
|
cv2.imwrite(file_name,qtImg) |
|
|
|
file_name_2 = "output/diptych-" + img_name[-6] + img_name[-5] + ".jpg" |
|
|
|
hConcat = concat_images(imgT, qtImg, boarder=img_boarder, color=(255,255,255)) |
|
|
|
cv2.imwrite(file_name_2,hConcat) |
|
|
|
printI(hConcat) |
|
|
|
|
|
|
|
displayQuadTree("night2.jpg", threshold=3, img_boarder=20, line_color=(0,0,0), line_boarder = 1) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
Every time I see these images, I think about how humans, cameras, and algorithms view and interpret reality. |
|
|
|
|
|
|
|
```python |
|
|
|
displayQuadTree("night4.jpg", threshold=5) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
In particular, night photography pairs remarkably well with this algorithm since many esthetics that night photographers have picked up distorts reality. |
|
|
|
Humans can rarely see vivid stars in the night nor light trails, yet if you set a camera with a long enough exposure, you will capture just that: and it is beautiful. |
|
|
|
With the increased prevalence of post-processing and filters on cameras, the photos we see now are never perfect representations of reality. |
|
|
|
|
|
|
|
```python |
|
|
|
displayQuadTree("../final/russell-final-1.jpg", threshold=12, line_color=(0,0,0)) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
I'm still vexed as to whether these distortions of reality are a good thing or a bad thing, or if this distinction is even pertinent. |
|
|
|
|
|
|
|
|
|
|
|
```python |
|
|
|
displayQuadTree("../final/russell-final-4.jpg", threshold=12, line_color=(0,0,0)) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
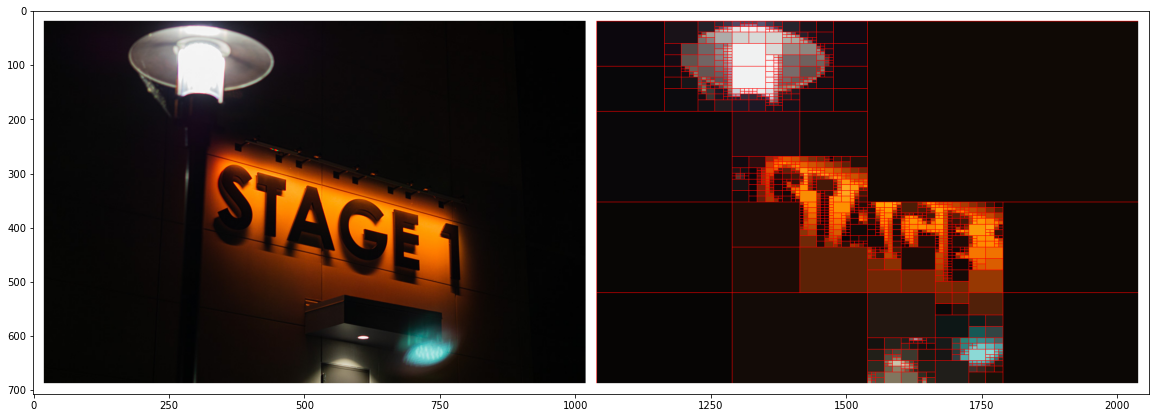
I am intrigued as to how detail are both illuminated and hidden away using the quadtrees. |
|
|
|
The main composition of the image remains unchanged, yet the more subtle details are cast away. |
|
|
|
|
|
|
|
|
|
|
|
```python |
|
|
|
displayQuadTree("../final/russell-final-7.jpg", threshold=12, line_color=(0,0,0)) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
```python |
|
|
|
displayQuadTree("../final/russell-final-10.jpg", threshold=12, line_color=(0,0,255)) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
```python |
|
|
|
displayQuadTree("../final/russell-final-14.jpg", threshold=12, line_color=(0,0,0)) |
|
|
|
``` |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
Despite being intuitively aware of the differences between reality and the images we see, it is hard for our minds to quantify this stark difference. |
|
|
|
On the one hand, these images are the only thing that I have from my nights out at RIT doing photography, thus making these images evidence of my experience-- the only tangible thing I can cling onto. |
|
|
|
Yet, on the other hand, it fails to capture the essence of RIT at night altogether. |
|
|
|
I framed these images with a tripod, and their long exposure shots distort light in a way that the human eye can't perceive. |
|
|
|
The edits with both Lightroom and my python script further distorts the original scene. |
|
|
|
|
|
|
|
The problem with seeing the world through a camera is that you miss everything the camera doesn't see. |
|
|
|
I can't show you precisely what last night's sky looked like, not really, but you can see tonight's, and it will be beautiful. |
|
|
|
|
|
|
|
 |


{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
