|
|
@ -0,0 +1,422 @@ |
|
|
|
|
|
It is fun to find an interesting use for old technology. Being someone who has |
|
|
|
|
|
tons of old floppy drives and loves music, I decided to turn my old floppy |
|
|
|
|
|
drives into an orchestra. I’m not sure where I first learned about musical |
|
|
|
|
|
floppy drives, however, there are thousands of videos on YouTube. |
|
|
|
|
|
|
|
|
|
|
|
This project first started over a year ago when I connected two floppy drives to |
|
|
|
|
|
a Raspberry Pi to play the Star Wars theme. |
|
|
|
|
|
|
|
|
|
|
|
<iframe width="560" height="315" |
|
|
|
|
|
src="https://www.youtube.com/embed/wcnUvPMpqjA" frameborder="0" allow="autoplay; |
|
|
|
|
|
encrypted-media" allowfullscreen\></iframe\> |
|
|
|
|
|
|
|
|
|
|
|
Although this was fun, there was hardly any software for playing different music |
|
|
|
|
|
on the Raspberry Pi. I managed to hack the software to also play Jingle Bells, |
|
|
|
|
|
however, that took hours to input just a single song. |
|
|
|
|
|
|
|
|
|
|
|
A half a year ago I got an Arduino board and built a new and improved floppy |
|
|
|
|
|
drive orchestra. |
|
|
|
|
|
|
|
|
|
|
|
<iframe width="560" height="315" |
|
|
|
|
|
src="https://www.youtube.com/embed/qwbcrR-6dTU" frameborder="0" allow="autoplay; |
|
|
|
|
|
encrypted-media" allowfullscreen\></iframe\> |
|
|
|
|
|
|
|
|
|
|
|
What is nice about using an Arduino, is that the software used is more |
|
|
|
|
|
developed. Unlike the program I used with the Raspberry Pi, the software used |
|
|
|
|
|
with the Arduino allows the songs to be loaded via a MIDI file. |
|
|
|
|
|
|
|
|
|
|
|
That brings us up to the present. My previous 8 floppy drive orchestra was not |
|
|
|
|
|
transportable and took up a ton of space. When I decided to present this project |
|
|
|
|
|
at Imagine RIT with RITLUG, I knew I had to rebuild my orchestra to be portable |
|
|
|
|
|
and compact. |
|
|
|
|
|
|
|
|
|
|
|
There are plenty of tutorials online demonstrating how to build floppy |
|
|
|
|
|
orchestras, but, many of them are incomplete. Since this was my third time |
|
|
|
|
|
building a floppy orchestra, I decided to log my process and make a complete |
|
|
|
|
|
tutorial for my blog. |
|
|
|
|
|
|
|
|
|
|
|
Hardware |
|
|
|
|
|
======== |
|
|
|
|
|
|
|
|
|
|
|
- 10 Floppy Drives |
|
|
|
|
|
|
|
|
|
|
|
- Arduino Uno |
|
|
|
|
|
|
|
|
|
|
|
- LOTS of Ribbon Cables |
|
|
|
|
|
|
|
|
|
|
|
- 1 Old Power Supply |
|
|
|
|
|
|
|
|
|
|
|
- Hot Glue |
|
|
|
|
|
|
|
|
|
|
|
- Solder |
|
|
|
|
|
|
|
|
|
|
|
In in addition to these materials, you will also want something to mount your |
|
|
|
|
|
floppy drives to. I decided to use 2x2’s and half inch screws because they are |
|
|
|
|
|
cheep and I had some laying around my house. |
|
|
|
|
|
|
|
|
|
|
|
Assembly |
|
|
|
|
|
======== |
|
|
|
|
|
|
|
|
|
|
|
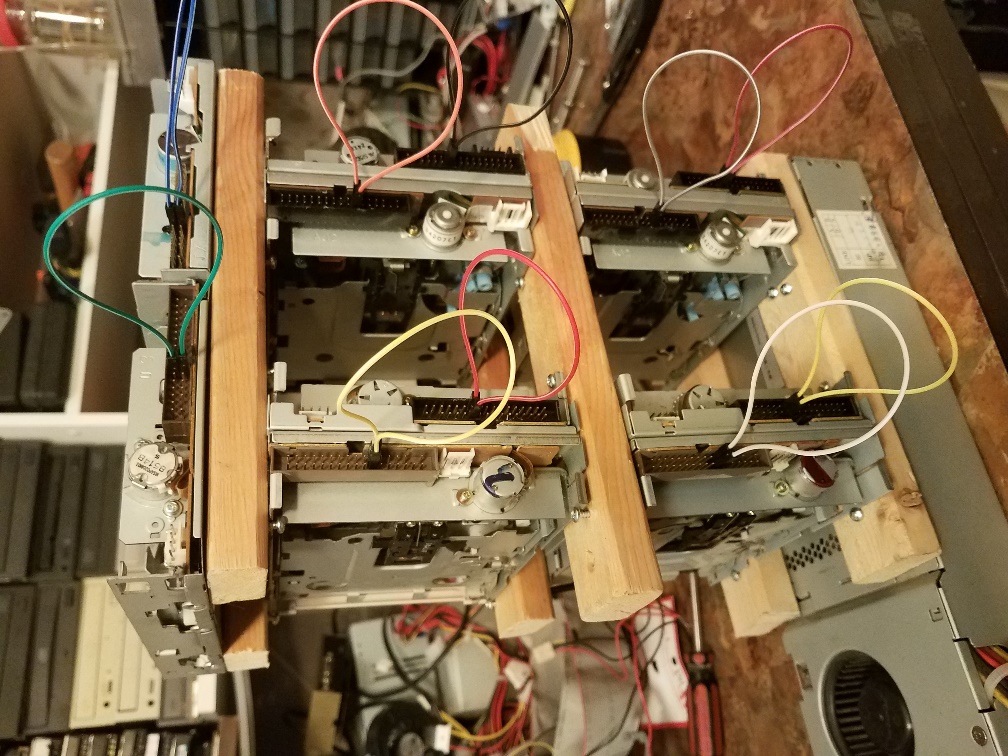
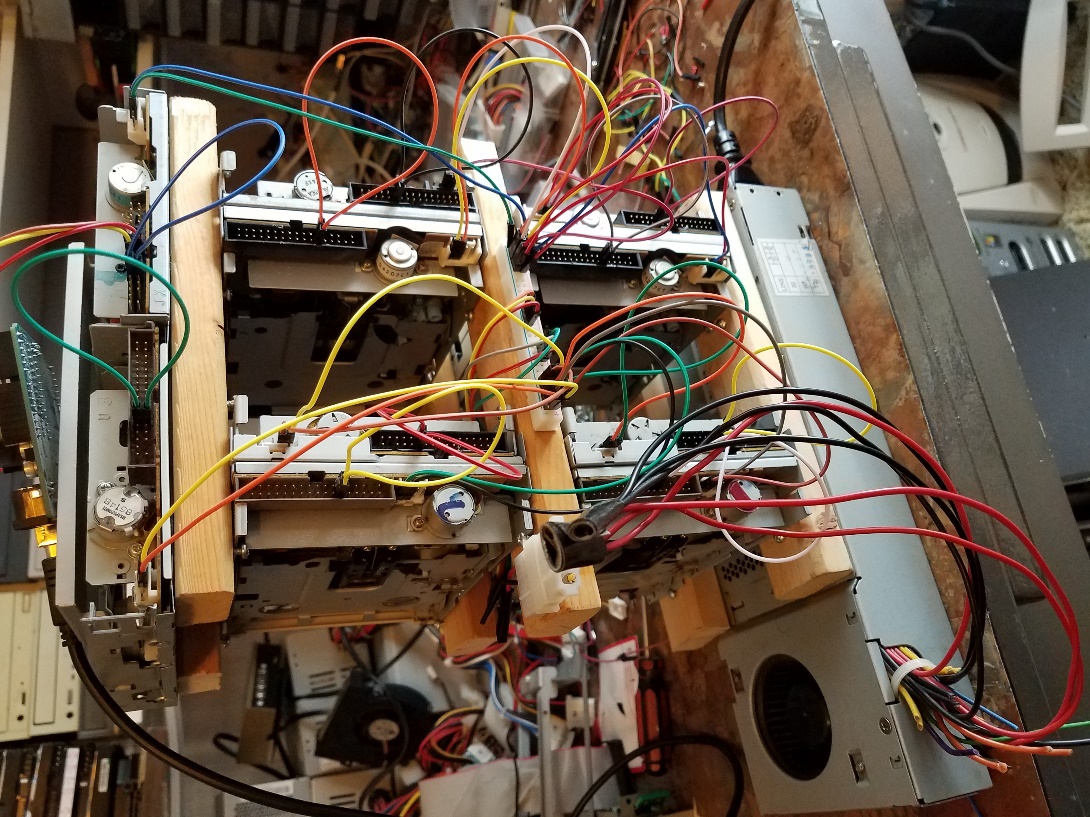
The first thing you should do is secure your floppy drives. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
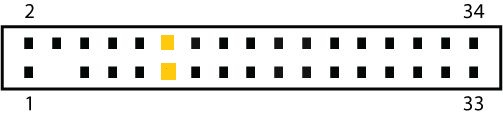
Now, it is time to power the floppy drives and turn them on. To make the floppy |
|
|
|
|
|
drives turn on, you need to connect pins 11 and 12 on your floppy drives |
|
|
|
|
|
together. You can easily do this with a single ribbon cable. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
You can use an old power supply for this project. Since we are only using the |
|
|
|
|
|
stepper motor in the floppy drives, you only need to supply 5v. Each floppy |
|
|
|
|
|
drive has four power connectors, the middle two pins are ground, and the right |
|
|
|
|
|
pin is 5v and the left pin 12v. Since I had ten floppy drives to power, I used a |
|
|
|
|
|
bread board to avoid excessive soldering. |
|
|
|
|
|
|
|
|
|
|
|
To turn on a power supply you simply connect the green wire to any ground wire. |
|
|
|
|
|
If you want to get fancy, you can solder on a switch, however, must people just |
|
|
|
|
|
jam a paper clip into the motherboard connector. |
|
|
|
|
|
|
|
|
|
|
|
FWI: The red wires in your power supply are 5v and the black wires are ground. |
|
|
|
|
|
|
|
|
|
|
|
**Warning**: Do not draw all your power from the power supply via a single |
|
|
|
|
|
ribbon cable, it will melt. Ribbon cables have low gauge and are not meant for |
|
|
|
|
|
high wattages. It is good idea to use multiple 5v lines from your power supply |
|
|
|
|
|
and make sure that nowhere in your wiring is all the voltage going through a |
|
|
|
|
|
single ribbon cable. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
If you have done everything correct up to this point, you will see the green |
|
|
|
|
|
lights on the floppy drives turn on when the power supply is running. |
|
|
|
|
|
|
|
|
|
|
|
Now we need to connect the pins of the floppy drive to the Arduino. |
|
|
|
|
|
|
|
|
|
|
|
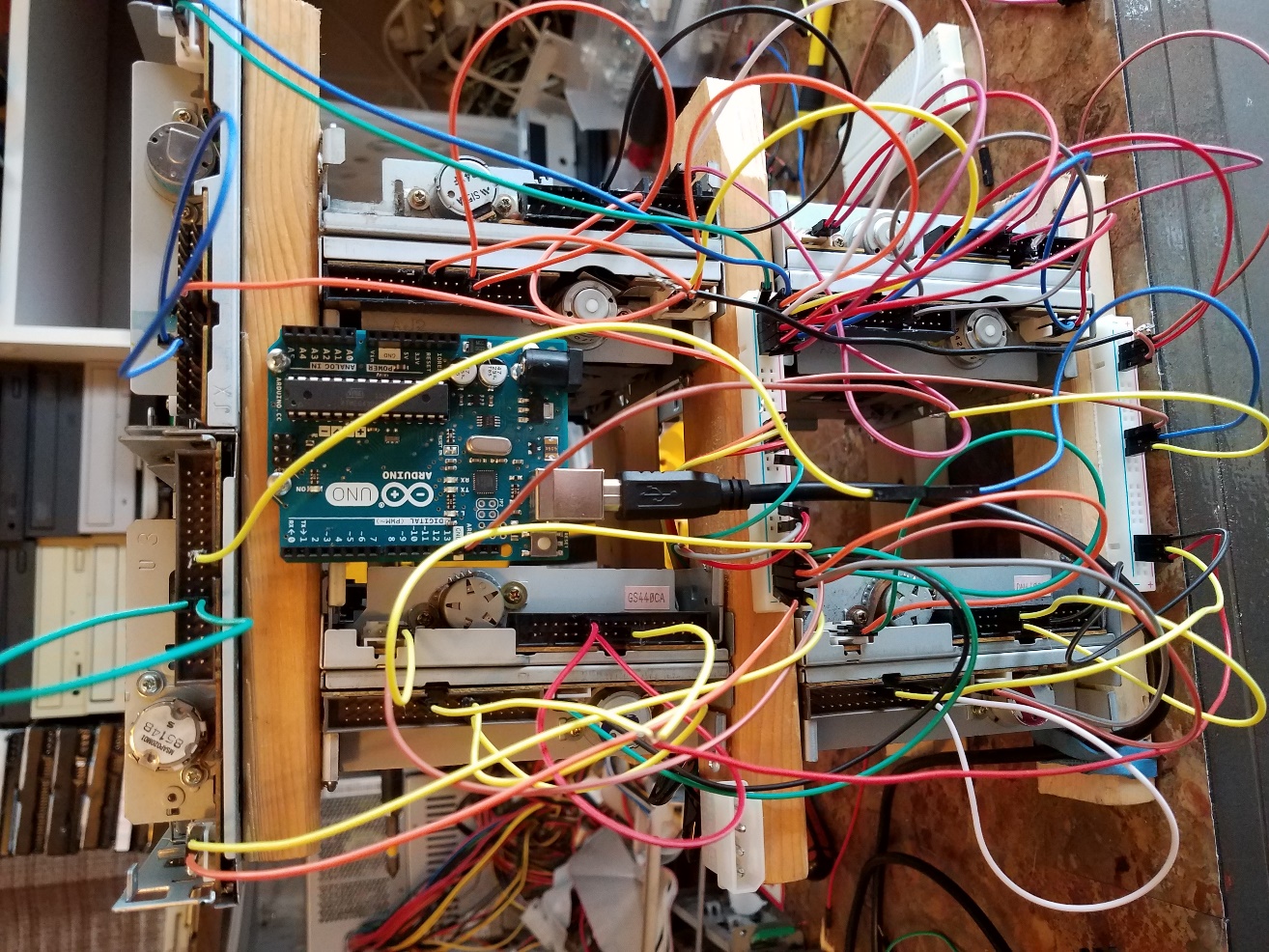
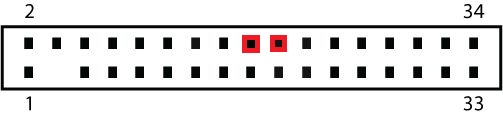
Personally, I started by connecting pin 19 on the floppy drive to the ground pin |
|
|
|
|
|
on the Arduino. Again, I used a bread board to make the connections easier. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
Next, we need to wire the step and direction pins of the floppy drives to the |
|
|
|
|
|
Arduino. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
Connect direction pin 18 on the floppy drive to pin 3 of the Arduino and step |
|
|
|
|
|
pin 20 to pin 2 of the Arduino. For additional floppy drives you follow the same |
|
|
|
|
|
pattern. For example, the next drive would be floppy pin 18 to Arduino pin 5 and |
|
|
|
|
|
floppy pin 20 to Arduino pin 4. If you are using something other than an Arduino |
|
|
|
|
|
Uno board this will potentially be different. We are using these specific pins |
|
|
|
|
|
on the Arduino because they correspond to this specific program. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
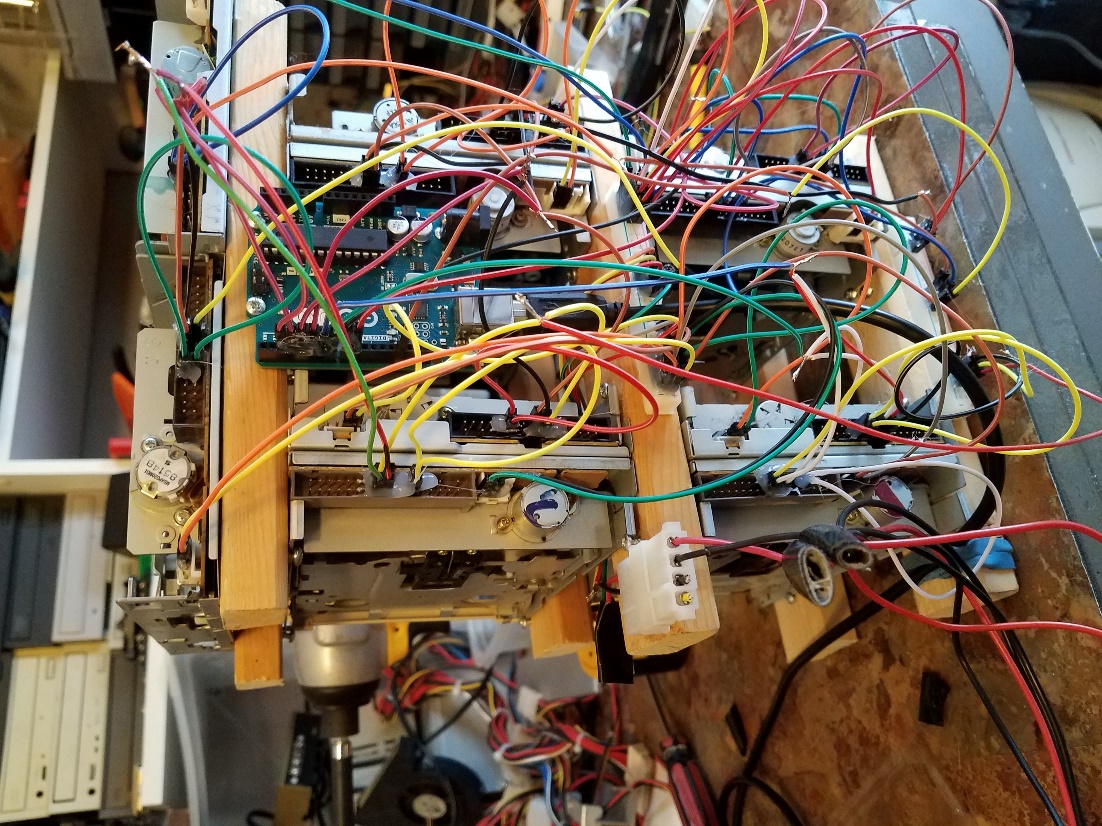
While making this, I had 4 sets of pins (8 total) connected to the Arduino, |
|
|
|
|
|
however, I have 10 floppy drives in total. I wired two sets of three drives and |
|
|
|
|
|
two sets of two drives together on the same Arduino “channel”. This makes the |
|
|
|
|
|
wiring easier and makes the sound better. Not all floppy drives sound the same, |
|
|
|
|
|
by pairing drives together you get a richer sound. Since I want to present this |
|
|
|
|
|
live, it also makes it louder for the audience. |
|
|
|
|
|
|
|
|
|
|
|
This is a ton of wiring! After you verify that the drives are working properly, |
|
|
|
|
|
I would strongly recommend using hot glue to secure ribbon cables to the drives. |
|
|
|
|
|
|
|
|
|
|
|
That’s it. Now your floppy drives should be good to go. |
|
|
|
|
|
|
|
|
|
|
|
Software |
|
|
|
|
|
======== |
|
|
|
|
|
|
|
|
|
|
|
This is the section where most other tutorials fall short. Please follow along |
|
|
|
|
|
carefully. First, have the following installed on your computer. |
|
|
|
|
|
|
|
|
|
|
|
- Arduino Software |
|
|
|
|
|
|
|
|
|
|
|
- NetBeans |
|
|
|
|
|
|
|
|
|
|
|
- JDK 1.8 – or higher |
|
|
|
|
|
|
|
|
|
|
|
Next download |
|
|
|
|
|
[timer1](https://code.google.com/archive/p/arduino-timerone/downloads) and |
|
|
|
|
|
[Moppy](https://github.com/SammyIAm/Moppy). Install timer one by extracting the |
|
|
|
|
|
files and copying the folder timer1 into the libraries folder under your root |
|
|
|
|
|
Arduino directory. |
|
|
|
|
|
|
|
|
|
|
|
Open up your Arduino software and paste the following code in the editor: |
|
|
|
|
|
|
|
|
|
|
|
``` |
|
|
|
|
|
|
|
|
|
|
|
#include <TimerOne.h> |
|
|
|
|
|
|
|
|
|
|
|
boolean firstRun = true; // Used for one-run-only stuffs; |
|
|
|
|
|
|
|
|
|
|
|
//First pin being used for floppies, and the last pin. Used for looping over all pins. |
|
|
|
|
|
const byte FIRST_PIN = 2; |
|
|
|
|
|
const byte PIN_MAX = 17; |
|
|
|
|
|
|
|
|
|
|
|
/*NOTE: Many of the arrays below contain unused indexes. This is |
|
|
|
|
|
to prevent the Arduino from having to convert a pin input to an alternate |
|
|
|
|
|
array index and save as many cycles as possible. In other words information |
|
|
|
|
|
for pin 2 will be stored in index 2, and information for pin 4 will be |
|
|
|
|
|
stored in index 4.*/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/*An array of maximum track positions for each step-control pin. Even pins |
|
|
|
|
|
are used for control, so only even numbers need a value here. 3.5" Floppies have |
|
|
|
|
|
80 tracks, 5.25" have 50. These should be doubled, because each tick is now |
|
|
|
|
|
half a position (use 158 and 98). |
|
|
|
|
|
*/ |
|
|
|
|
|
byte MAX_POSITION[] = { |
|
|
|
|
|
0,0,158,0,158,0,158,0,158,0,158,0,158,0,158,0,158,0}; |
|
|
|
|
|
|
|
|
|
|
|
//Array to track the current position of each floppy head. (Only even indexes (i.e. 2,4,6...) are used) |
|
|
|
|
|
byte currentPosition[] = { |
|
|
|
|
|
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}; |
|
|
|
|
|
|
|
|
|
|
|
/*Array to keep track of state of each pin. Even indexes track the control-pins for toggle purposes. Odd indexes |
|
|
|
|
|
track direction-pins. LOW = forward, HIGH=reverse |
|
|
|
|
|
*/ |
|
|
|
|
|
int currentState[] = { |
|
|
|
|
|
0,0,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW,LOW |
|
|
|
|
|
}; |
|
|
|
|
|
|
|
|
|
|
|
//Current period assigned to each pin. 0 = off. Each period is of the length specified by the RESOLUTION |
|
|
|
|
|
//variable above. i.e. A period of 10 is (RESOLUTION x 10) microseconds long. |
|
|
|
|
|
unsigned int currentPeriod[] = { |
|
|
|
|
|
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0 |
|
|
|
|
|
}; |
|
|
|
|
|
|
|
|
|
|
|
//Current tick |
|
|
|
|
|
unsigned int currentTick[] = { |
|
|
|
|
|
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0 |
|
|
|
|
|
}; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
//Setup pins (Even-odd pairs for step control and direction |
|
|
|
|
|
void setup(){ |
|
|
|
|
|
pinMode(13, OUTPUT);// Pin 13 has an LED connected on most Arduino boards |
|
|
|
|
|
pinMode(2, OUTPUT); // Step control 1 |
|
|
|
|
|
pinMode(3, OUTPUT); // Direction 1 |
|
|
|
|
|
pinMode(4, OUTPUT); // Step control 2 |
|
|
|
|
|
pinMode(5, OUTPUT); // Direction 2 |
|
|
|
|
|
pinMode(6, OUTPUT); // Step control 3 |
|
|
|
|
|
pinMode(7, OUTPUT); // Direction 3 |
|
|
|
|
|
pinMode(8, OUTPUT); // Step control 4 |
|
|
|
|
|
pinMode(9, OUTPUT); // Direction 4 |
|
|
|
|
|
pinMode(10, OUTPUT); // Step control 5 |
|
|
|
|
|
pinMode(11, OUTPUT); // Direction 5 |
|
|
|
|
|
pinMode(12, OUTPUT); // Step control 6 |
|
|
|
|
|
pinMode(13, OUTPUT); // Direction 6 |
|
|
|
|
|
pinMode(14, OUTPUT); // Step control 7 |
|
|
|
|
|
pinMode(15, OUTPUT); // Direction 7 |
|
|
|
|
|
pinMode(16, OUTPUT); // Step control 8 |
|
|
|
|
|
pinMode(17, OUTPUT); // Direction 8 |
|
|
|
|
|
|
|
|
|
|
|
Timer1.initialize(RESOLUTION); // Set up a timer at the defined resolution |
|
|
|
|
|
Timer1.attachInterrupt(tick); // Attach the tick function |
|
|
|
|
|
|
|
|
|
|
|
Serial.begin(9600); |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
void loop(){ |
|
|
|
|
|
|
|
|
|
|
|
//The first loop, reset all the drives, and wait 2 seconds... |
|
|
|
|
|
if (firstRun) |
|
|
|
|
|
{ |
|
|
|
|
|
firstRun = false; |
|
|
|
|
|
resetAll(); |
|
|
|
|
|
delay(2000); |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
//Only read if we have |
|
|
|
|
|
if (Serial.available() > 2){ |
|
|
|
|
|
//Watch for special 100-message to reset the drives |
|
|
|
|
|
if (Serial.peek() == 100) { |
|
|
|
|
|
resetAll(); |
|
|
|
|
|
//Flush any remaining messages. |
|
|
|
|
|
while(Serial.available() > 0){ |
|
|
|
|
|
Serial.read(); |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
else{ |
|
|
|
|
|
currentPeriod[Serial.read()] = (Serial.read() << 8) | Serial.read(); |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/* |
|
|
|
|
|
Called by the timer inturrupt at the specified resolution. |
|
|
|
|
|
*/ |
|
|
|
|
|
void tick() |
|
|
|
|
|
{ |
|
|
|
|
|
/* |
|
|
|
|
|
If there is a period set for control pin 2, count the number of |
|
|
|
|
|
ticks that pass, and toggle the pin if the current period is reached. |
|
|
|
|
|
*/ |
|
|
|
|
|
if (currentPeriod[2]>0){ |
|
|
|
|
|
currentTick[2]++; |
|
|
|
|
|
if (currentTick[2] >= currentPeriod[2]){ |
|
|
|
|
|
togglePin(2,3); |
|
|
|
|
|
currentTick[2]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[4]>0){ |
|
|
|
|
|
currentTick[4]++; |
|
|
|
|
|
if (currentTick[4] >= currentPeriod[4]){ |
|
|
|
|
|
togglePin(4,5); |
|
|
|
|
|
currentTick[4]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[6]>0){ |
|
|
|
|
|
currentTick[6]++; |
|
|
|
|
|
if (currentTick[6] >= currentPeriod[6]){ |
|
|
|
|
|
togglePin(6,7); |
|
|
|
|
|
currentTick[6]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[8]>0){ |
|
|
|
|
|
currentTick[8]++; |
|
|
|
|
|
if (currentTick[8] >= currentPeriod[8]){ |
|
|
|
|
|
togglePin(8,9); |
|
|
|
|
|
currentTick[8]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[10]>0){ |
|
|
|
|
|
currentTick[10]++; |
|
|
|
|
|
if (currentTick[10] >= currentPeriod[10]){ |
|
|
|
|
|
togglePin(10,11); |
|
|
|
|
|
currentTick[10]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[12]>0){ |
|
|
|
|
|
currentTick[12]++; |
|
|
|
|
|
if (currentTick[12] >= currentPeriod[12]){ |
|
|
|
|
|
togglePin(12,13); |
|
|
|
|
|
currentTick[12]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[14]>0){ |
|
|
|
|
|
currentTick[14]++; |
|
|
|
|
|
if (currentTick[14] >= currentPeriod[14]){ |
|
|
|
|
|
togglePin(14,15); |
|
|
|
|
|
currentTick[14]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
if (currentPeriod[16]>0){ |
|
|
|
|
|
currentTick[16]++; |
|
|
|
|
|
if (currentTick[16] >= currentPeriod[16]){ |
|
|
|
|
|
togglePin(16,17); |
|
|
|
|
|
currentTick[16]=0; |
|
|
|
|
|
} |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
void togglePin(byte pin, byte direction_pin) { |
|
|
|
|
|
|
|
|
|
|
|
//Switch directions if end has been reached |
|
|
|
|
|
if (currentPosition[pin] >= MAX_POSITION[pin]) { |
|
|
|
|
|
currentState[direction_pin] = HIGH; |
|
|
|
|
|
digitalWrite(direction_pin,HIGH); |
|
|
|
|
|
} |
|
|
|
|
|
else if (currentPosition[pin] <= 0) { |
|
|
|
|
|
currentState[direction_pin] = LOW; |
|
|
|
|
|
digitalWrite(direction_pin,LOW); |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
//Update currentPosition |
|
|
|
|
|
if (currentState[direction_pin] == HIGH){ |
|
|
|
|
|
currentPosition[pin]--; |
|
|
|
|
|
} |
|
|
|
|
|
else { |
|
|
|
|
|
currentPosition[pin]++; |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
//Pulse the control pin |
|
|
|
|
|
digitalWrite(pin,currentState[pin]); |
|
|
|
|
|
currentState[pin] = ~currentState[pin]; |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
// |
|
|
|
|
|
//// UTILITY FUNCTIONS |
|
|
|
|
|
// |
|
|
|
|
|
|
|
|
|
|
|
//Not used now, but good for debugging... |
|
|
|
|
|
void blinkLED(){ |
|
|
|
|
|
digitalWrite(13, HIGH); // set the LED on |
|
|
|
|
|
delay(250); // wait for a second |
|
|
|
|
|
digitalWrite(13, LOW); |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
//For a given controller pin, runs the read-head all the way back to 0 |
|
|
|
|
|
void reset(byte pin) |
|
|
|
|
|
{ |
|
|
|
|
|
digitalWrite(pin+1,HIGH); // Go in reverse |
|
|
|
|
|
for (byte s=0;s<MAX_POSITION[pin];s+=2){ //Half max because we're stepping directly (no toggle) |
|
|
|
|
|
digitalWrite(pin,HIGH); |
|
|
|
|
|
digitalWrite(pin,LOW); |
|
|
|
|
|
delay(5); |
|
|
|
|
|
} |
|
|
|
|
|
currentPosition[pin] = 0; // We're reset. |
|
|
|
|
|
digitalWrite(pin+1,LOW); |
|
|
|
|
|
currentPosition[pin+1] = 0; // Ready to go forward. |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
//Resets all the pins |
|
|
|
|
|
void resetAll(){ |
|
|
|
|
|
|
|
|
|
|
|
// Old one-at-a-time reset |
|
|
|
|
|
//for (byte p=FIRST_PIN;p<=PIN_MAX;p+=2){ |
|
|
|
|
|
// reset(p); |
|
|
|
|
|
//} |
|
|
|
|
|
|
|
|
|
|
|
// New all-at-once reset |
|
|
|
|
|
for (byte s=0;s<80;s++){ // For max drive's position |
|
|
|
|
|
for (byte p=FIRST_PIN;p<=PIN_MAX;p+=2){ |
|
|
|
|
|
digitalWrite(p+1,HIGH); // Go in reverse |
|
|
|
|
|
digitalWrite(p,HIGH); |
|
|
|
|
|
digitalWrite(p,LOW); |
|
|
|
|
|
} |
|
|
|
|
|
delay(5); |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
for (byte p=FIRST_PIN;p<=PIN_MAX;p+=2){ |
|
|
|
|
|
currentPosition[p] = 0; // We're reset. |
|
|
|
|
|
digitalWrite(p+1,LOW); |
|
|
|
|
|
currentState[p+1] = 0; // Ready to go forward. |
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
``` |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
Now you can upload this script to your Arduino. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
If you get any errors about your COM port, make sure that your Arduino is set to |
|
|
|
|
|
listen on COM1 under the Device manager –Windows only. |
|
|
|
|
|
|
|
|
|
|
|
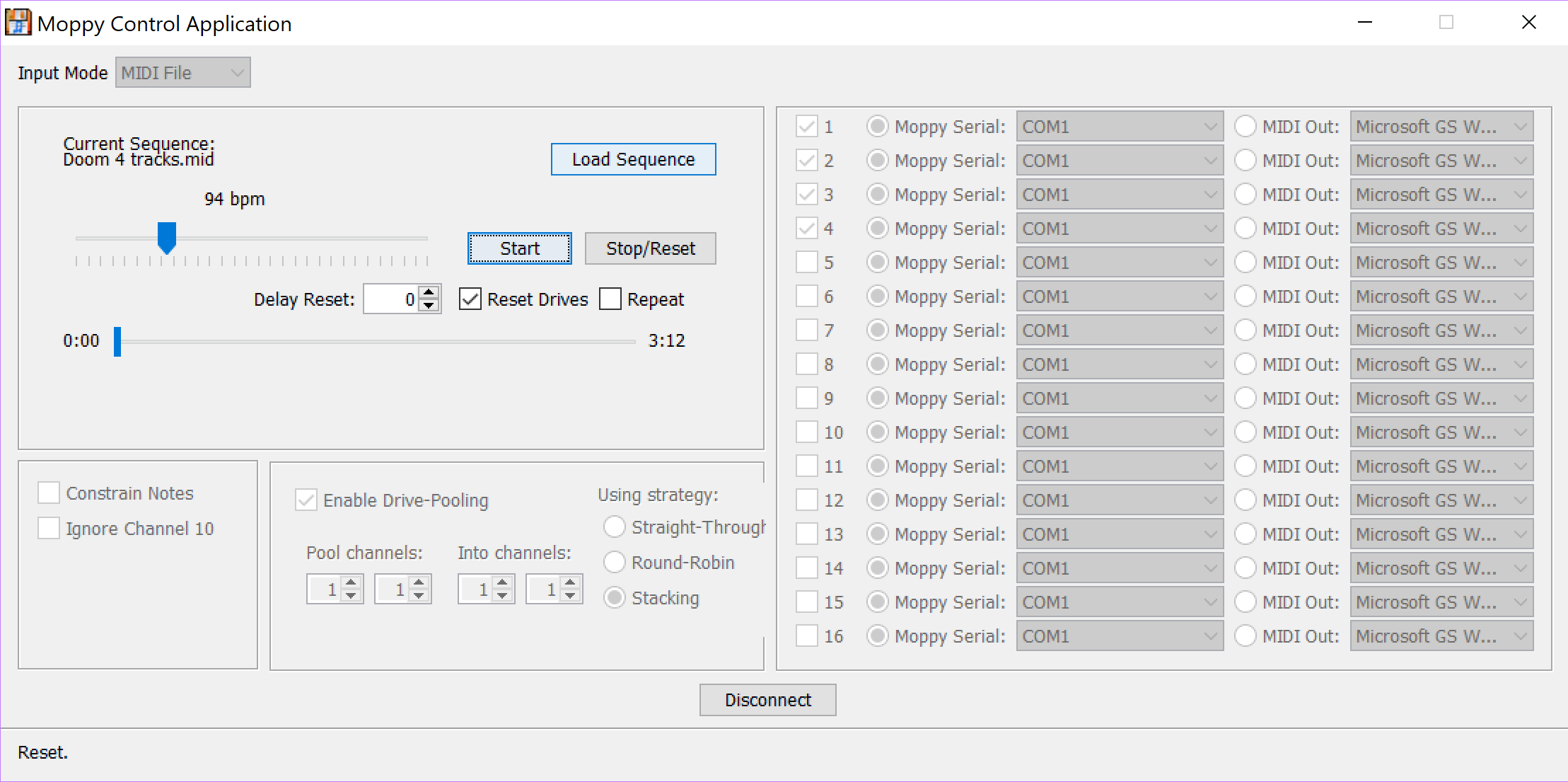
If that works, you can now open Moppy through Netbeans and start playing with |
|
|
|
|
|
your musical floppy drives. |
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
For a great package of MIDI music to use check out |
|
|
|
|
|
[MrSolidSnake](https://github.com/coon42/Floppy-Music--midis-). Not all MIDI |
|
|
|
|
|
songs work well with floppy drives. Songs with too many tracks obviously won’t |
|
|
|
|
|
work well. Songs with high notes will sound terrible on floppy drives since they |
|
|
|
|
|
will grind their motors. Also, long notes don’t sound good because the floppy |
|
|
|
|
|
drives just spin back and forth. MrSolidSnake did a wonderful job at compiling a |
|
|
|
|
|
bunch of MIDI files that work’s well with floppy drives. |
|
|
|
|
|
|
|
|
|
|
|
I hope that this tutorial was helpful. |

 Jeffery R
8 years ago
Jeffery R
8 years ago
{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
